

meta data for this page
Xtrapulspack Servo drive SIN/COS 1Vpp
for the configuration of the Xtrapulspack Gem Drive Studio software is used.
Please use our Datasheet engine to see the motor parameters.
Step 1) ⇒ Motor config ⇒ Current limit

Step 2) => Motor config => Current Loop

Step 3) Position sensors
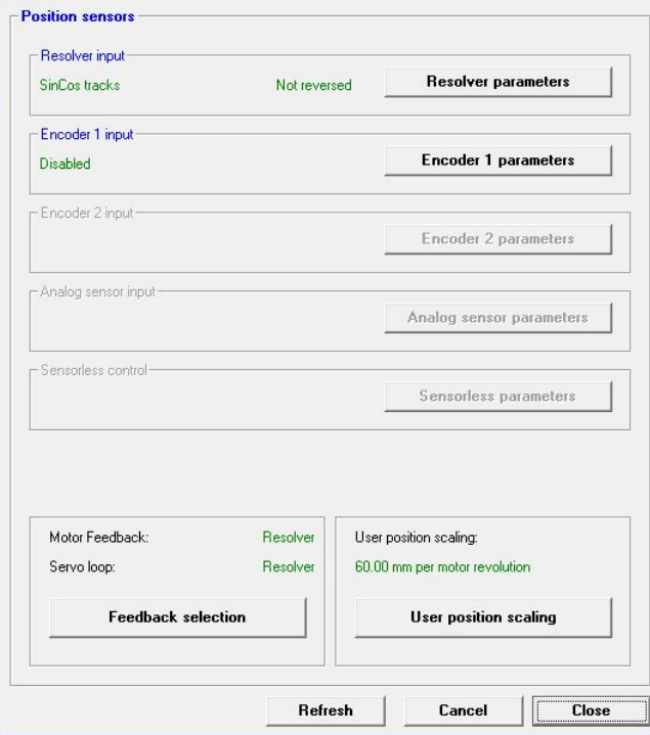
Note that if you use NL80Q or NL080X you need to use scaling set to 30mm and if you use NL040Q
or NL040X you need to set the scaling to 18mm.
Step 4) Position sensors ⇒ User position scaling

Step 5) Motor config ⇒ Autophasing

Step 6) Specify the motion profile requirements
Use Profile modes to specified using Position profile mode the speed and acceleration requirements for your application.
Step 7) Perform an Autotune
Use Controller ⇒ Autotuning to tune the motor following the position profile mode specifications.